PowerPoint Presentation
Scene 1 (0s)
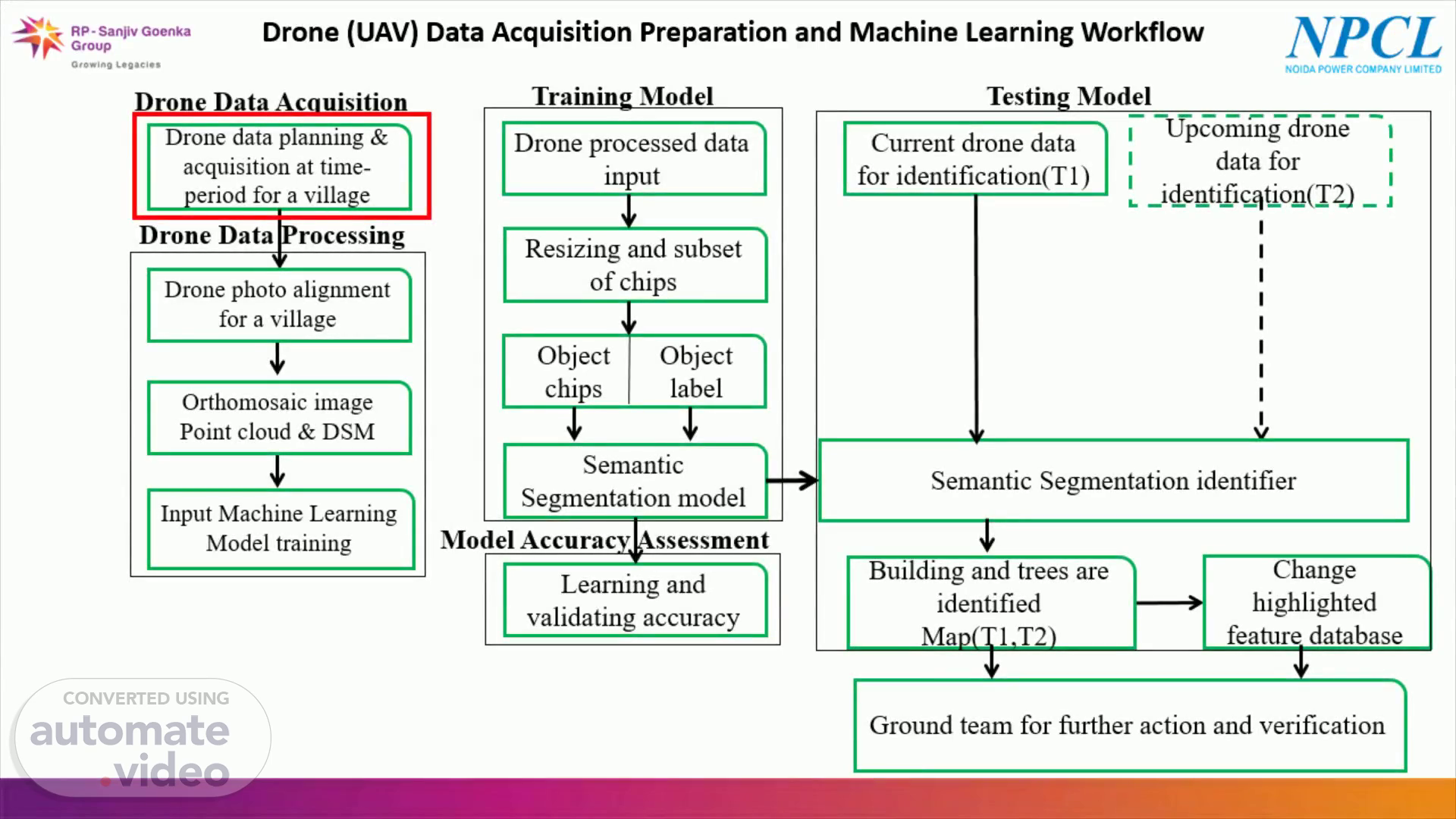
Drone (UAV) Data Acquisition Preparation and Machine Learning Workflow.
Scene 3 (56s)
Drone (UAV) Data Acquisition Preparation and Machine Learning Workflow.
Scene 4 (1m 21s)
Untitled 1 Toolbox Home Spatial Model Model Editor • Maker • Contents (S @ 2D View File c:ns Manage Data KJ Raster Vector Terrain Raster Drawing Help Google Earth Multispectral IMAGINE UAV Format Table O x Mosaic AutoSync Stereo Maps VirtualGlS ATCOR Workflow IMAGINE Workstation • Analyst • for IMAGINE • UAV• Common GEOSYSTEMS 2D View #1 : XS_truecoIor_sub.img Standard Network processing Marker lma e In ut Input Folder: File Selection Filter. •jpg Orientation Orientation Format: From Exif Orientation File: Time offset: Sign: + v e.g.: •jpg or DSC?.jpg or Allow incomplete orientation data Background Related Data Retriever 535440.00, 3766400.w (UTM/ Clarke 1866) Hours: Minutes: Accura of Camera Postion and Rotation An les 5.0 Seconds: Rotation angles [Deg.]: Position [m]: 5.0 Com utation O tions Orientation Presets: Surface Quality: Z Position [m]: 2.0 aerial medium Image Preselection: Surface Mode: generic height field Out uto •ons output EPSG: Create LAS: DSMO ions Create DSM: Resolution Type: Mosaic O tions Create Mosaic 32643 LAS Output File: (*.las) lasmalk.las DSM Output File: (*.img) malkdsm.img Original Mosaic Output File: (*.im malori.img Resolution 0m) 535440.m, 3766400.00 r.
Scene 5 (2m 1s)
Drone (UAV) Data Acquisition Preparation and Machine Learning Workflow.
Scene 6 (2m 26s)
Initialize Output Input Detection Information Initialize Image Segmenter Machine Intellect Output Machine Intellect Input Segment Image Using Deep Learning Machine Intellect Information.
Scene 7 (2m 38s)
Training data:- Is the Drone Data chip(small image) and class labels used to train AI/ML model. Data chip is of specific size, class-labels and its data structures. Must be similar data types and image bands for training and testing of model. Training epochs to understand and learn the training data..
Scene 8 (2m 58s)
Learning & Validating Accuracy. Model Accuracy Assessment Accuracy Percentage (%) Model Learning Accuracy(LA) 84 % Model Validation (VA) (15% of input chip) 78 %.
Scene 9 (3m 8s)
Drone (UAV) Data Acquisition Preparation and Machine Learning Workflow.
Scene 10 (3m 33s)
Convolution 3x3 ( ReLU ) Copy and crop Max pool 2x2 Transposed up-convolution 2x2 Convolution 1x1.
Scene 11 (3m 46s)
vector.shp Features Input edimag16bsub.img Raster Input Rasta stic:s Pa Feature Seled Attributæ Class Initiaize Random Forest H_mLmiz Fil Machire Intellect Output AttributeTable Classifi' usirg Machire Learnirg Tr •ningAttributelmportances rf_class limg Raster Output.
Scene 12 (3m 58s)
Background Related Data Retriever 741593.11. 3155809.92 View malakpur_old.ecw mulakpur finalmosaicl.ec Info (20 (UTM / WGS 84) 1 741593.11. 31550.92 meters (UTM Zone 43(WGS u Mao.
Scene 13 (4m 10s)
DRONE IMAGES BASED OUTCOMES-MALAKPUR (T2). .4.
Scene 14 (4m 17s)
CHANGE HIGHLIGHTED. File Home Manage Data Raster Vector Terrain 20 View mal-changeram.shp Toolbox Untitled:l - ERDAS IMAGINE 2020 Help Google Earth My Models Multispectral Raster Drawing Format Table Login to Smart M App c9 O view # 1 mal-changeramshp C] malakpurold_build_identii mUlakpur finalmosaicl Background Related Data 741710.18, 3155788.80 (UTM/WGSU) | 741710.18, 3155788.80 meters (UTM Zone43(WGS 84)).
Scene 16 (4m 38s)
Electric Locality, MALAKPUR Ice Web O RP - sutpv Goenua• SSingh6 v Group Growing 81.